MCU微课堂|CKS32F4xx系列CAN通信
MCU微课堂
CKS32F4xx系列
CAN通信
第二十六期 2023.11.28
CAN简介
当前,CAN的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
CAN控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。
CAN协议具有以下特点:1)多主控制2)系统的柔软性3)通信速度较快,通信距离远4)具有错误检测、错误通知和错误恢复功能5)故障封闭功能6)连接节点多CKS32F4xx系列自带的是bxCAN,即基本扩展CAN。它支持CAN协议2.0A和2.0B。它的设计目标是,以最小的CPU负荷来高效处理大量收到的报文。它也支持报文发送的优先级要求(优先级特性可软件配置)。对于安全紧要的应用,bxCAN提供所有支持时间触发通信模式所需的硬件功能。
CKS32F4xx系列的bxCAN的主要特点有:
●支持CAN协议2.0A和2.0B主动模式
● 波特率最高达1Mbps
● 支持时间触发通信
● 具有3个发送邮箱
● 具有3级深度的2个接收FIFO
● 可变的过滤器组(28个,CAN1和CAN2共享)本章只用了1个CAN,即CAN1。
双CAN的框图如图1所示:
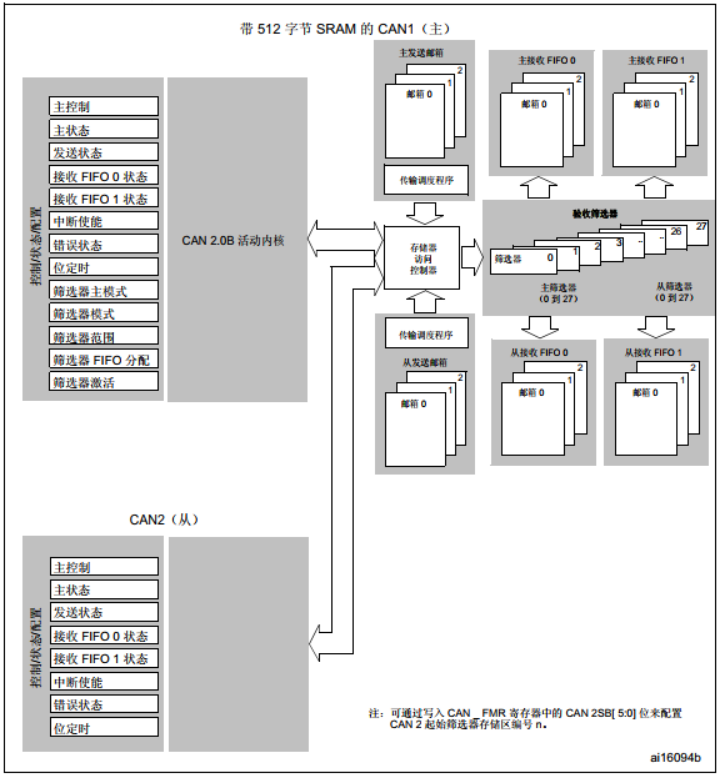
从图中可以看出两个CAN都分别拥有自己的发送邮箱和接收FIFO,但是他们共用28个滤波器。通过CAN_FMR寄存器的设置,可以设置滤波器的分配方式。CKS32F4xx系列的标识符过滤比较复杂,它的存在减少了CPU处理CAN通信的开销。CKS32F4xx系列的过滤器(也称筛选器)组最多有28个,每个滤波器组x由2个32为寄存器,CAN_FxR1和CAN_FxR2组成。CKS32F4xx系列每个过滤器组的位宽都可以独立配置,以满足应用程序的不同需求。根据位宽的不同,每个过滤器组可提供:●1个32位过滤器,包括:STDID[10:0]、EXTID[17:0]、IDE和RTR位● 2个16位过滤器,包括:STDID[10:0]、IDE、RTR和EXTID[17:15]位此外过滤器可配置为,屏蔽位模式和标识符列表模式。在屏蔽位模式下,标识符寄存器和屏蔽寄存器一起,指定报文标识符的任何一位,应该按照“必须匹配”或“不用关心”处理。而在标识符列表模式下,屏蔽寄存器也被当作标识符寄存器用。因此,不是采用一个标识符加一个屏蔽位的方式,而是使用2个标识符寄存器。接收报文标识符的每一位都必须跟过滤器标识符相同。通过CAN_FMR寄存器,可以配置过滤器组的位宽和工作模式,如图2所示:
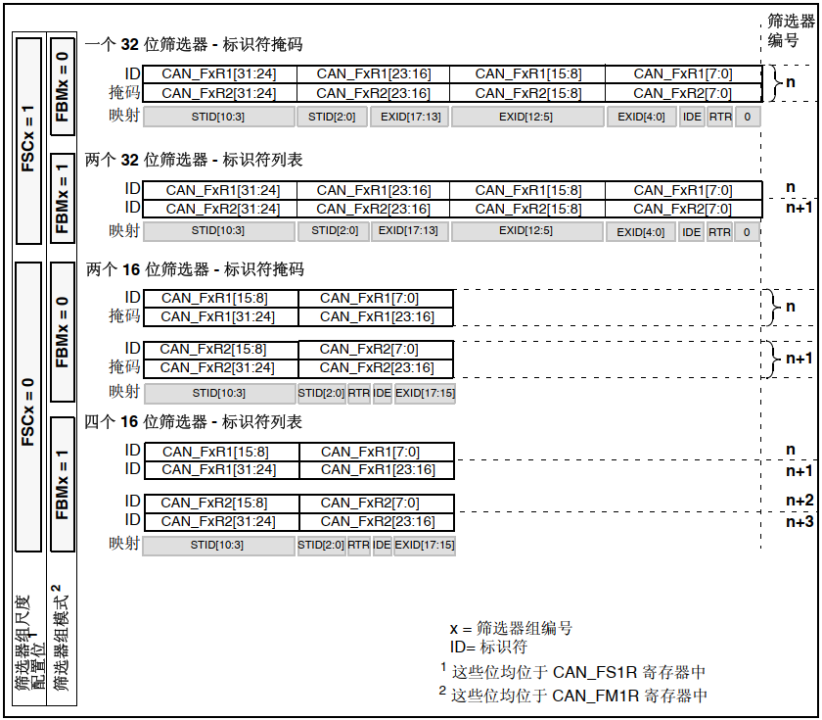
为了过滤出一组标识符,应该设置过滤器组工作在屏蔽位模式。为了过滤出一个标识符,应该设置过滤器组工作在标识符列表模式。应用程序不用的过滤器组,应该保持在禁用状态。过滤器组中的每个过滤器,都被编号为从0开始,到某个最大数值-取决于过滤器组的模式和位宽的设置。举个简单的例子,我们设置过滤器组0工作在:1个32位过滤器-标识符屏蔽模式,然后设置CAN_F0R1=0XFFFF0000,CAN_F0R2=0XFF00FF00。其中存放到CAN_F0R1的值就是期望收到的ID,即我们希望收到的ID(STID+EXTID+IDE+RTR)最好是:0XFFFF0000。而0XFF00FF00就是设置我们需要必须关心的ID,表示收到的ID,其位[31:24]和位[15:8]这16个位的必须和CAN_F0R1中对应的位一模一样,而另外的16个位则不关心,可以一样,也可以不一样,都认为是正确的ID,即收到的ID必须是0XFFxx00xx,才算是正确的(x表示不关心)。
CAN发送流程
CAN发送流程为:程序选择1个空置的邮箱(TME=1)→设置标识符(ID),数据长度和发送数据→设置CAN_TIxR的TXRQ位为1,请求发送→邮箱挂号(等待成为最高优先级)→预定发送(等待总线空闲)→发送→邮箱空置。整个流程如图3所示:
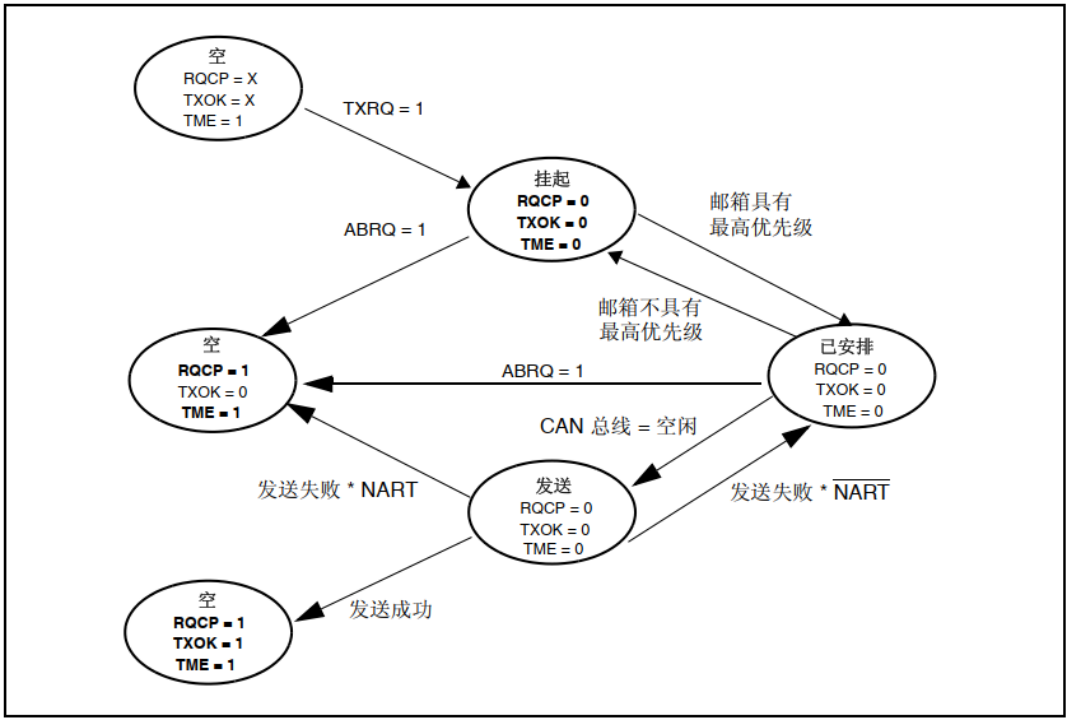
上图中,还包含了很多其他处理,终止发送(ABRQ=1)和发送失败处理等。通过这个流程图,我们大致了解了CAN的发送流程,后面的数据发送,我们基本就是按照此流程来走。
CAN接收流程
CAN接收到的有效报文,被存储在3级邮箱深度的FIFO中。FIFO完全由硬件来管理,从而节省了CPU的处理负荷,简化了软件并保证了数据的一致性。应用程序只能通过读取FIFO输出邮箱,来读取FIFO中最先收到的报文。这里的有效报文是指那些正确被接收的(直到EOF都没有错误)且通过了标识符过滤的报文。前面我们知道CAN的接收有2个FIFO,我们每个滤波器组都可以设置其关联的FIFO,通过CAN_FFA1R的设置,可以将滤波器组关联到FIFO0/FIFO1。CAN接收流程为:FIFO空→收到有效报文→挂号_1(存入FIFO的一个邮箱,这个由硬件控制,我们不需要理会)→收到有效报文→挂号_2→收到有效报文→挂号_3→收到有效报文→溢出。这个流程里面,我们没有考虑从FIFO读出报文的情况,实际情况是:我们必须在FIFO溢出之前,读出至少1个报文,否则下个报文到来,将导致FIFO溢出,从而出现报文丢失。每读出1个报文,相应的挂号就减1,直到FIFO空。CAN接收流程如图4所示:
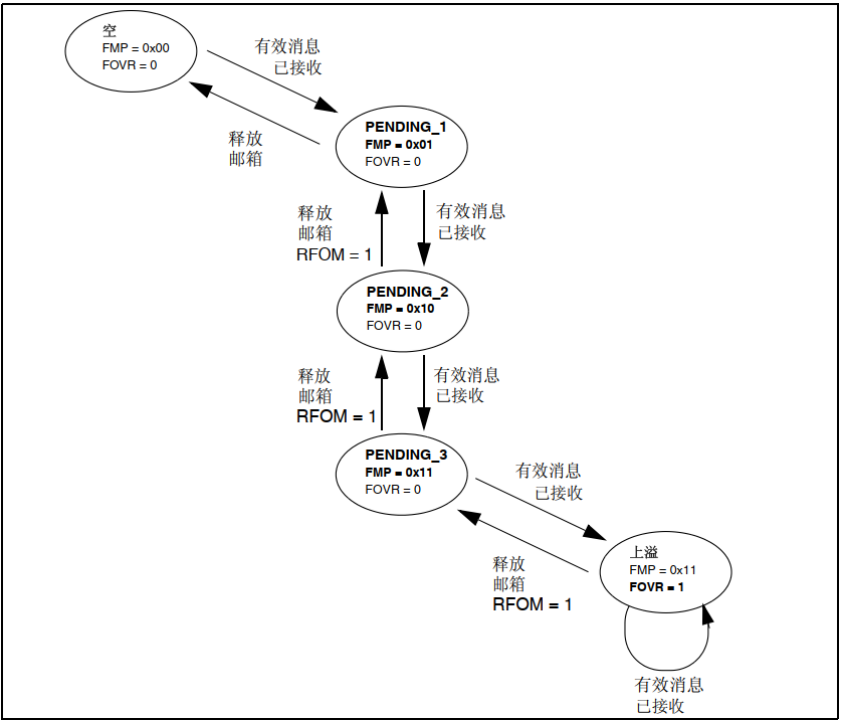
FIFO接收到的报文数,我们可以通过查询CAN_RFxR的FMP寄存器来得到,只要FMP不为0,我们就可以从FIFO读出收到的报文。
CAN时间特性
CKS32F4xx系列把传播时间段和相位缓冲段1(CKS32F4xx系列称之为时间段1)合并了,所以CKS32F4xx系列的CAN一个位只有3段:同步段(SYNC_SEG)、时间段1(BS1)和时间段2(BS2)。CKS32F4xx系列的BS1段可以设置为1~16个时间单元,刚好等于传播时间段和相位缓冲段1之和。CKS32F4xx系列的CAN位时序如图5所示:
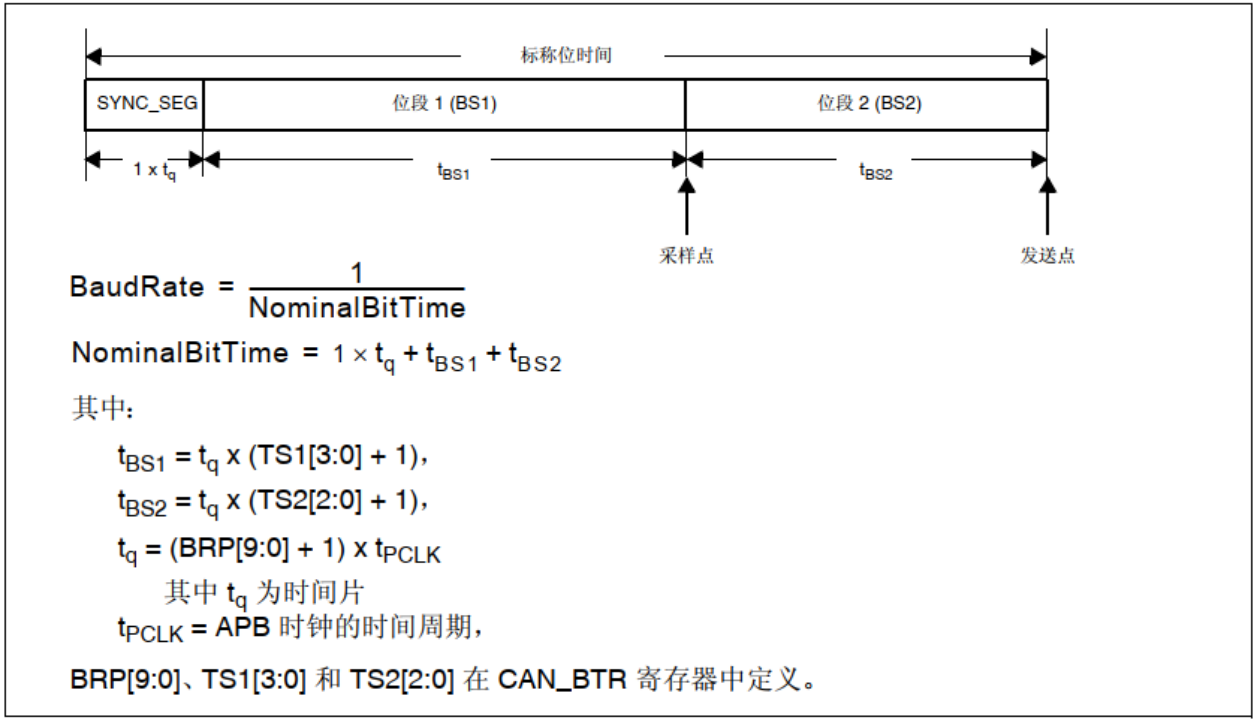
图中还给出了CAN波特率的计算公式,我们只需要知道BS1和BS2的设置,以及APB1的时钟频率(一般为42Mhz),就可以方便的计算出波特率。比如设置TS1=6、TS2=5和BRP=5,在APB1频率为42Mhz的条件下,即可得到CAN通信的波特率=42000/[(7+6+1)*6]=500Kbps。
CAN程序配置
1)配置相关引脚的复用功能(AF9),使能CAN时钟我们要用CAN,第一步就要使能CAN的时钟,CAN的时钟通过APB1ENR的第25位来设置。其次要设置CAN的相关引脚为复用输出,这里我们需要设置PA11(CAN1_RX)和PA12(CAN1_TX)为复用功能(AF9),并使能PA口的时钟。具体配置过程如下:
//使能相关时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//使能 PORTA 时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);//使能 CAN1 时钟
//初始化 GPIO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11| GPIO_Pin_12;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化 PA11,PA12
//引脚复用映射配置
GPIO_PinAFConfig(GPIOA,GPIO_PinSource11,GPIO_AF_CAN1);//PA11 复用为 CAN1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource12,GPIO_AF_CAN1);//PA12 复用为 CAN12)设置CAN工作模式及波特率等这一步通过先设置CAN_MCR寄存器的INRQ位,让CAN进入初始化模式,然后设置CAN_MCR的其他相关控制位。再通过CAN_BTR设置波特率和工作模式(正常模式/环回模式)等信息。最后设置INRQ为0,退出初始化模式。在库函数中,提供了函数CAN_Init()用来初始化CAN的工作模式以及波特率,CAN_Init()函数体中,在初始化之前,会设置CAN_MCR寄存器的INRQ为1让其进入初始化模式,然后初始化CAN_MCR寄存器和CRN_BTR寄存器之后,会设置CAN_MCR寄存器的INRQ为0让其退出初始化模式。所以我们在调用这个函数的前后不需要再进行初始化模式设置。下面我们来看看CAN_Init()函数的定义:
uint8_t CAN_Init(CAN_TypeDef* CANx, CAN_InitTypeDef* CAN_InitStruct);
第一个参数就是CAN标号,这里我们使用的是芯片CAN1,所以就配置成CAN1。第二个参数是CAN初始化结构体指针,结构体类型是CAN_InitTypeDef,下面我们来看看这个结构体的定义:
typedefstruct
{
uint16_t CAN_Prescaler;
uint8_t CAN_Mode;
uint8_t CAN_SJW;
uint8_t CAN_BS1;
uint8_t CAN_BS2;
FunctionalState CAN_TTCM;
FunctionalState CAN_ABOM;
FunctionalState CAN_AWUM;
FunctionalState CAN_NART;
FunctionalState CAN_RFLM;
FunctionalState CAN_TXFP;
} CAN_InitTypeDef;这个结构体看起来成员变量比较多,实际上参数可以分为两类。前面5个参数是用来设置寄存器CAN_BTR,用来设置模式以及波特率相关的参数,这在前面有讲解过,设置模式的参数是CAN_Mode,我们实验中用到回环模式CAN_Mode_LoopBack和常规模式CAN_Mode_Normal,大家还可以选择静默模式以及静默回环模式测试。其他设置波特率相关的参数CAN_Prescaler,CAN_SJW,CAN_BS1和CAN_BS2分别用来设置波特率分频器,重新同步跳跃宽度以及时间段1和时间段2占用的时间单元数。后面6个成员变量用来设置寄存器CAN_MCR,也就是设置CAN通信相关的控制位。初始化实例为:
CAN_InitStructure.CAN_TTCM=DISABLE; //非时间触发通信模式
CAN_InitStructure.CAN_ABOM=DISABLE; //软件自动离线管理
CAN_InitStructure.CAN_AWUM=DISABLE; //睡眠模式通过软件唤醒
CAN_InitStructure.CAN_NART=ENABLE; //禁止报文自动传送
CAN_InitStructure.CAN_RFLM=DISABLE; //报文不锁定,新的覆盖旧的
CAN_InitStructure.CAN_TXFP=DISABLE; //优先级由报文标识符决定
CAN_InitStructure.CAN_Mode= CAN_Mode_LoopBack; //模式设置 1,回环模式;
CAN_InitStructure.CAN_SJW=CAN_SJW_1tq;//重新同步跳跃宽度为个时间单位
CAN_InitStructure.CAN_BS1=CAN_BS1_8tq; //时间段 1 占用 8 个时间单位
CAN_InitStructure.CAN_BS2=CAN_BS2_7tq;//时间段 2 占用 7 个时间单位
CAN_InitStructure.CAN_Prescaler=5; //分频系数(Fdiv)
CAN_Init(CAN1, &CAN_InitStructure); // 初始化 CAN13)设置滤波器本章,我们将使用滤波器组0,并工作在32位标识符屏蔽位模式下。先设置CAN_FMR的FINIT位,让过滤器组工作在初始化模式下,然后设置滤波器组0的工作模式以及标识符ID和屏蔽位。最后激活滤波器,并退出滤波器初始化模式。在库函数中,提供了函数CAN_FilterInit()用来初始化CAN的滤波器相关参数,CAN_Init()函数体中,在初始化之前,会设置CAN_FMR寄存器的INRQ为INIT让其进入初始化模式,然后初始化CAN滤波器相关的寄存器之后,会设置CAN_FMR寄存器的FINIT为0让其退出初始化模式。所以我们在调用这个函数的前后不需要再进行初始化模式设置。下面我们来看看CAN_FilterInit()函数的定义:
voidCAN_FilterInit(CAN_FilterInitTypeDef* CAN_FilterInitStruct);
这个函数只有一个入口参数就是CAN滤波器初始化结构体指针,结构体类型为CAN_FilterInitTypeDef,下面我们看看类型定义:
typedefstruct
{
uint16_t CAN_FilterIdHigh;
uint16_t CAN_FilterIdLow;
uint16_t CAN_FilterMaskIdHigh;
uint16_t CAN_FilterMaskIdLow;
uint16_t CAN_FilterFIFOAssignment;
uint8_t CAN_FilterNumber;
uint8_t CAN_FilterMode;
uint8_t CAN_FilterScale;
FunctionalState CAN_FilterActivation;
} CAN_FilterInitTypeDef;结构体一共有9个成员变量,第1个至第4个是用来设置过滤器的32位id以及32位maskid,分别通过2个16位来组合的,这个在前面有讲解过它们的意义。第5个成员变量CAN_FilterFIFOAssignment用来设置FIFO和过滤器的关联关系,我们的实验是关联的过滤器0到FIFO0,值为CAN_Filter_FIFO0。第6个成员变量CAN_FilterNumber用来设置初始化的过滤器组,取值范围为0~13。第7个成员变量FilterMode用来设置过滤器组的模式,取值为标识符列表模式CAN_FilterMode_IdList和标识符屏蔽位模式CAN_FilterMode_IdMask。第8个成员变量FilterScale用来设置过滤器的位宽为2个16位CAN_FilterScale_16bit还是1个32位CAN_FilterScale_32bit。第9个成员变量CAN_FilterActivation就很明了了,用来激活该过滤器。过滤器初始化参考实例代码:
CAN_FilterInitStructure.CAN_FilterNumber=0; //过滤器 0
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //32 位
CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000;////32 位 ID
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//32 位 MASK
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_Filter_FIFO0;// FIFO0
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE; //激活过滤器 0
CAN_FilterInit(&CAN_FilterInitStructure);//滤波器初始化4)发送接受消息在初始化CAN相关参数以及过滤器之后,接下来就是发送和接收消息了。库函数中提供了发送和接受消息的函数。发送消息的函数是:
uint8_t CAN_Transmit(CAN_TypeDef* CANx, CanTxMsg* TxMessage);
这个函数的第一个参数是CAN标号,我们使用CAN1。第二个参数是相关消息结构体CanTxMsg指针类型,CanTxMsg结构体的成员变量用来设置标准标识符,扩展标识符,消息类型和消息帧长度等信息。接受消息的函数是:
voidCAN_Receive(CAN_TypeDef* CANx, uint8_t FIFONumber, CanRxMsg* RxMessage);
前面两个参数也比较好理解,CAN标号和FIFO号。第二个参数RxMessage是用来存放接受到的消息信息。结构体CanRxMsg和结构体CanTxMsg比较接近,分别用来定义发送消息和描述接受消息。5)CAN状态获取对于CAN发送消息的状态,挂起消息数目等等之类的传输状态信息,库函数提供了一些列的函数,包括CAN_TransmitStatus()函数,CAN_MessagePending()函数,CAN_GetFlagStatus()函数等等,大家可以根据需要来调用。至此,CAN就可以开始正常工作了。
- 深圳市汇创科电子科技有限公司
- 电话:0755-27809147
- 传真:0755-27809147
- 手机:13823247950
- 网址:www.hck-tech.com
- 销售中心:深圳市宝安区西乡街道固戍二路下围园七星创意园B座501
